Chapter 10 On-policy Control with Approximation
这一章主要介绍一些在线策略的近似控制方法,对于片段式任务,可以直接应用之前的方法。而对于连续式任务,则需要引入一些新的技巧,并且之前的折扣奖励机制不再需要。
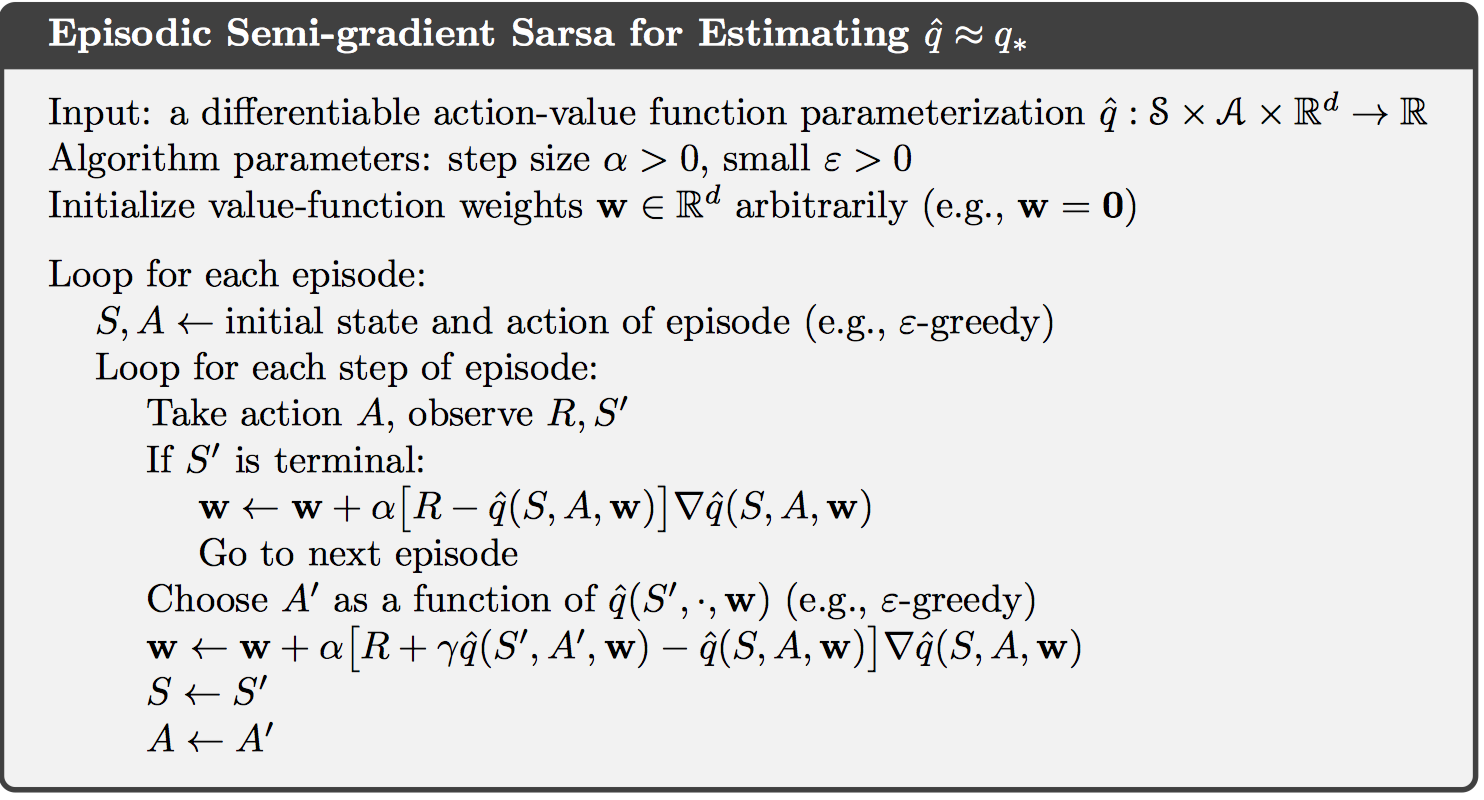
10.1 Episodic Semi-gradient Control
如果动作空间是离散的、有限的,则直接之间按照上一章的方法计算动作值函数$\hat { q } \left( S { t } , a , \mathbf { w } { t } \right)$,然后定义最优动作$A { t } ^ { * } = \arg \max { a } \hat { q } \left( S { t } , a , \mathbf { w } { t } \right)$。之后使用软策略实现策略提升过程,如$\epsilon-greedy$,如下所示:
10.2 Semi-gradient n-step Sarsa
对于n-step sarsa,使用同样的方法。其中,权重更新公式如下: 伪代码如下:
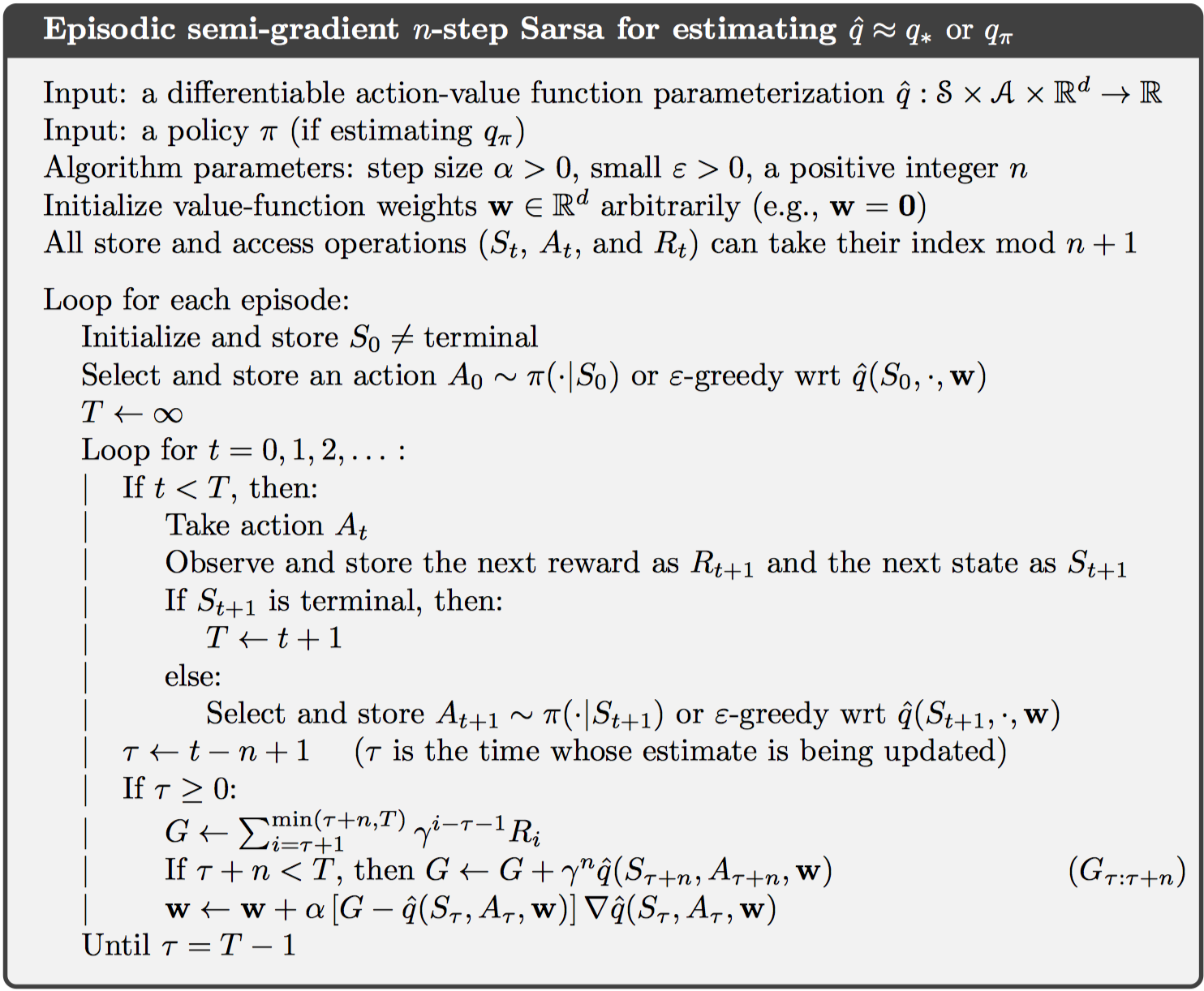
很多情况下,设置大于1的中间自引导步数可以得到最好的结果。
10.3 Average Reward: A New Problem Setting for Continuing Tasks
前面所介绍的都是对于片段式任务而言,并且使用折扣奖励机制。这一节主要针对连续式任务,并引入均值奖励设置,定义如下: 其中,$\mu{\pi}$是一个固定的分布,可以定义为$\mu { \pi } ( s ) \doteq \lim { t \rightarrow \infty } \operatorname { Pr } { S { t } = s| A _ { 0 : t - 1 } \sim \pi }$,这种假设称为遍历,这意味着MDP的起始状态或者任何早期决定都只具有有限的影响,在长期运行中,期望值只受转移概率和策略的影响。
因此,在连续式任务中,均值奖励最大的策略是最优策略。注意到状态的分布是不变的,因此存在以下公式:
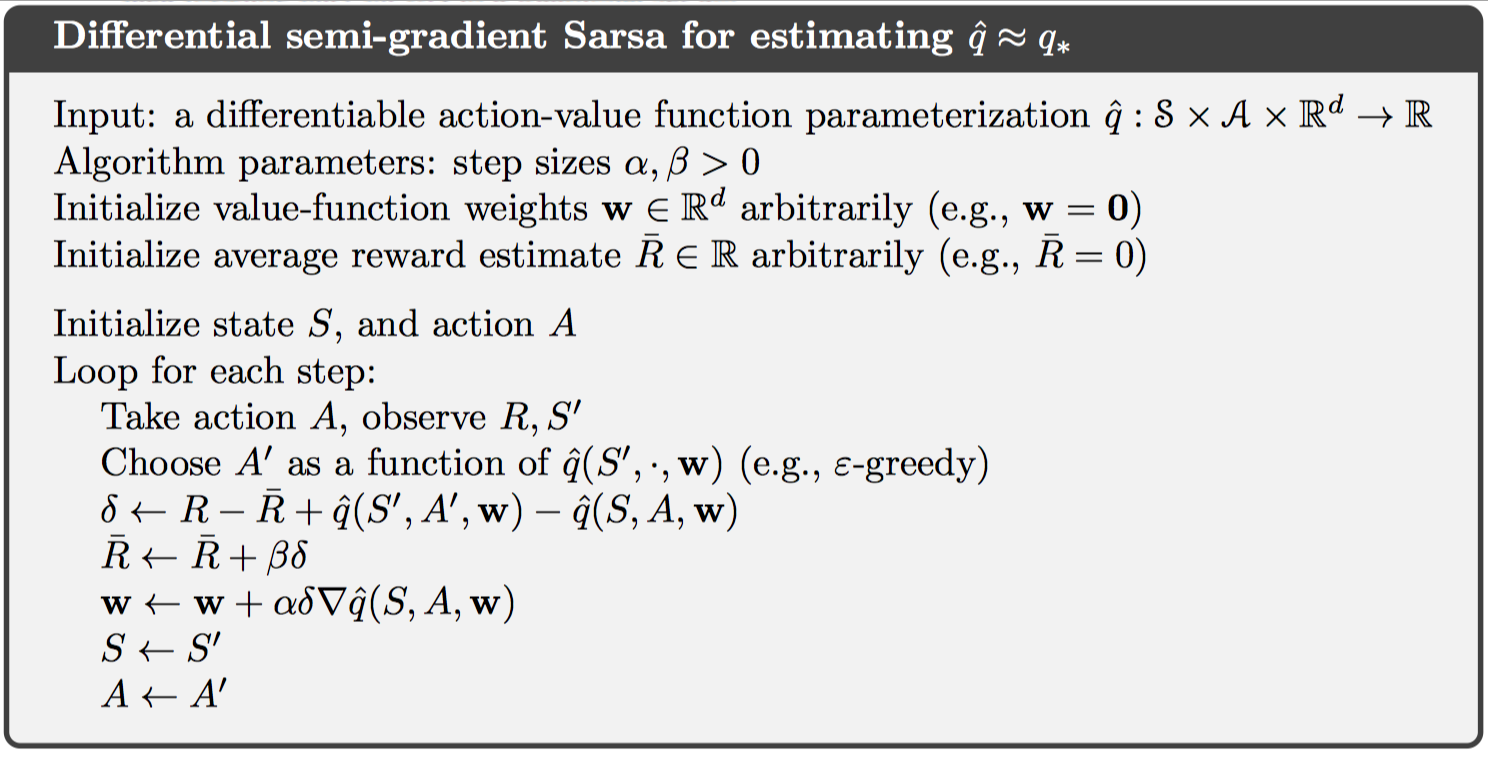
返回值则被定义为均值奖励的差值,如下:
这也被称为差值奖励,此外,还存在差值值函数,差值贝尔曼方程等。差值TD error定义如下:
这样一来,权重更新可以与上一张采用相同的方式,如下:
10.4 Deprecating the Discounted Setting
在近似强化学习中,折扣奖励机制没有任何作用。
考虑一个无限的返回值序列,所有状态相同,假设均值奖励为$r(\pi)$,则折扣奖励的权重为$1 + \gamma + \gamma ^ { 2 } + \gamma ^ { 3 } + \cdots = 1 / ( 1 - \gamma )$,即$r ( \pi ) / ( 1 - \gamma )$,可以看到,折扣值对于最终的计算没有任何影响。
根本原因在于,在近似函数逼近中,当改变策略来提升某个状态的折扣奖励值时,全局策略不一定保证提升。即4.2节中的策略提升定义失效。
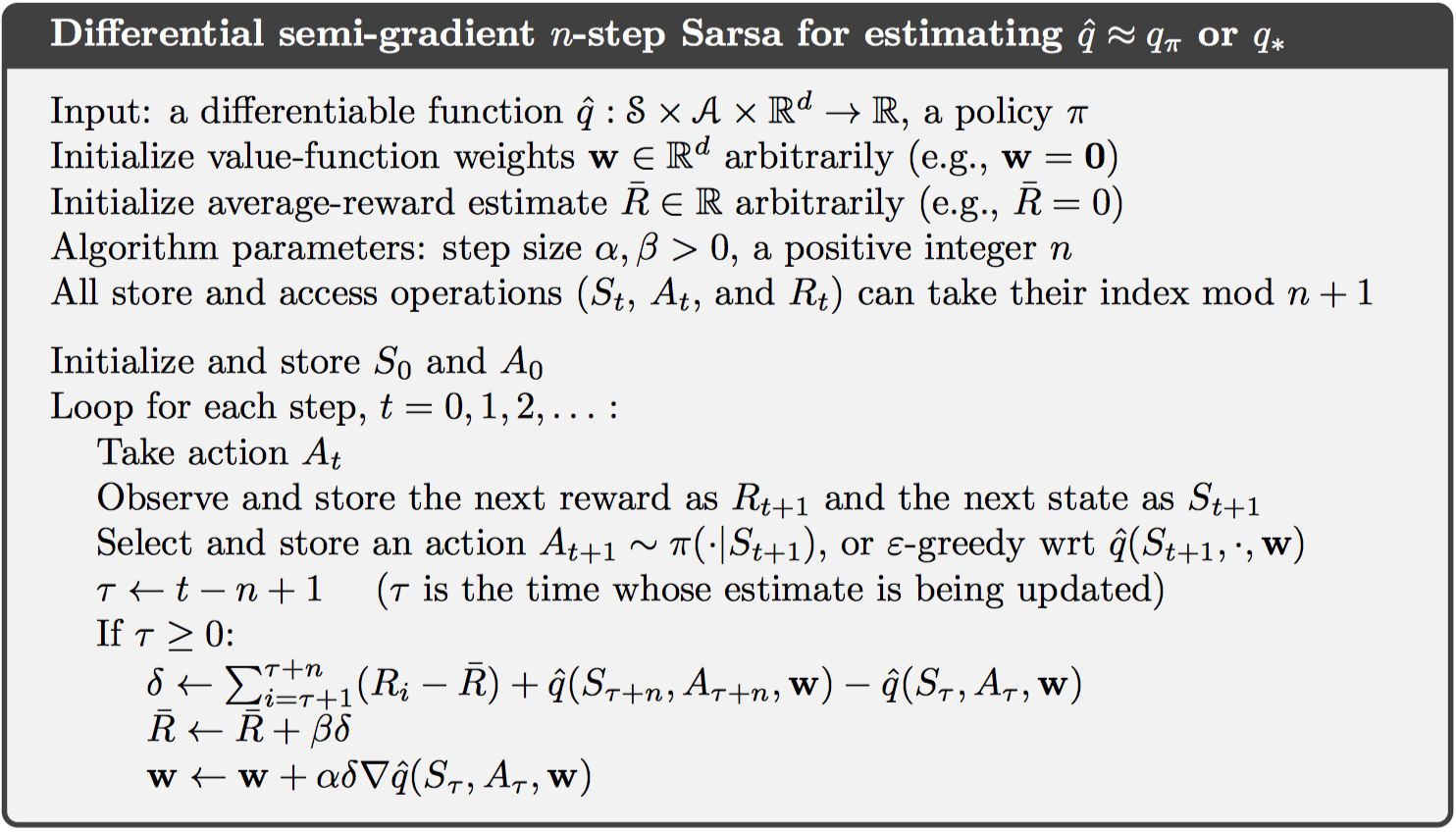
10.5 Differential Semi-gradient n-step Sarsa
连续式任务仍然可以使用n-step自引导控制方法,定义差值返回值如下: 则n-step td error为: 伪代码如下:
10.6 Summary
这一章中将参数化函数逼近的方法和半梯度下降的方法,应用在线策略的强化学习控制方法中,包括连续式任务和片段式任务。对于连续式任务,由于在函数逼近方法中不能使用折扣奖励机制,故而提出均值奖励设置,并引入差值形式的各种值函数、贝尔曼方程和TD误差。