Chapter 3: Finite Markov Decision Processes(有限马尔科夫决策过程)
3.1 The Agent–Environment Interface(个体和环境接口)
有限马尔科夫决策过程是一种交互式的问题导向学习问题。包括个体和环境,个体可以学习制作决定,所有个体之外的因素包含在环境中。
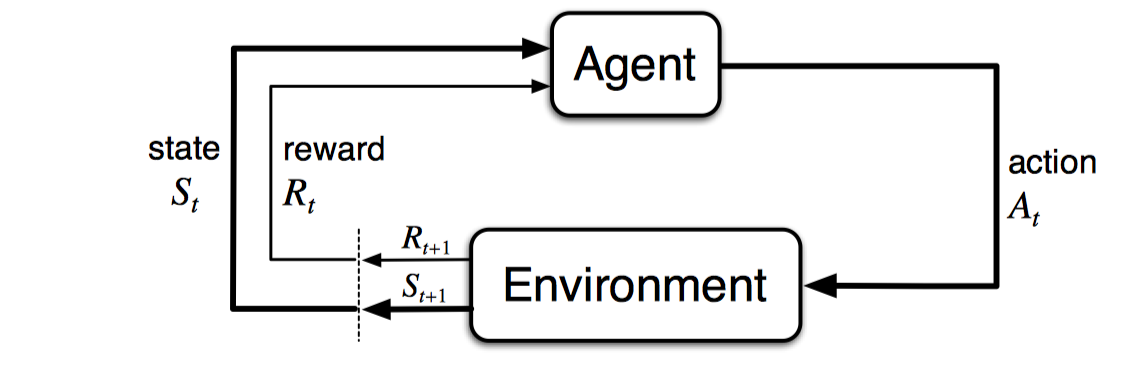
上述为马尔科夫随机过程的循环图,如果展开为一个时间序列,可以为:S0,A0,R1,S1,A1,R2,S2,A2,R3,...
如果对于有限马尔科夫随机过程而言,这个序列是有限个的,即时间步数是有限的。这种情况下,下一个时间步的Rt和St都服从一个固定的离散概率分布,且只与其前一个状态和前一个动作相关,数学定义如下:
这个概率p包含四个参数,可以完全描述一个有限马尔科夫随机过程。也可以派生出一些其他的表达式,如状态转移概率,获得奖励的期望等等。
MDP只是一种抽象的问题定义,对于不同的任务还需要具体化。一般来说,动作为我们需要去学习的决策,而状态则是那些可以帮助我们学习决策的任何东西。同样,对于个体和环境的边界的定义,仍然在不同的问题中不太一样。一般来说,不可以被个体任意改变的东西被认为是属于环境的,而其他则是属于个体的。这种边界表现了个体的控制局限性,但并不代表个体的知识局限性,即个体可能知道环境是如何运作的,但却依然无法改变环境获得最大奖励。
任何目标导向的学习问题都可以简化为MDP的三要素,即动作、状态和奖励。因此,解决一个问题,包含两个步骤:如何将问题表示为MDP过程的三要素?如何基于MDP的表示,求最优解?
3.2 Goals and Rewards(目标和奖励)
在强化学习中,学习目标是一个数学化的奖励信号,并且这个奖励不是即时计算的,而是定义为假设奖励(reward hypothsis):即最大化一段时间内所有累计奖励的期望。
使用奖励信号形式化描述学习目标是强化学习一个重要特征。
此外,强化学习的奖励并不包含先验知识,即这个奖励只是让个体明确其终极目标,而并不告知个体如何去实现它,应注意,个体在实现这个奖励最大化的过程中,可能存在很多子目标,这些子目标不属于奖励的范围内。
3.3 Returns and Episodes(返回值和片段)
通常情况下,使用返回值作为所有奖励的和,最大化返回值作为直接目标。对于片段式任务,即天然离散有限个时间点,交互过程可以看到多个独立重复的时间片段。定义返回值如下:
除了片段式任务,还包括连续式任务,即交互过程无法天然划分为多个片段,连续进行下去,没有时间限制。这种任务使用折扣返回值度量,如下:
$\gamma$表示折扣率,折扣率小于1时,折扣返回值在连续式任务中是有限大的。当其等于0时,称之为短视的,即返回值只等于当前奖励;而返回值接近于1的时候,称之为长视的,计算也更加困难。
3.4 Unified Notation for Episodic and Continuing Tasks(片段任务和连续任务的统一表示)
上一节中介绍的片段任务和连续任务都有着不同的返回值表达方式。对于片段式任务而言,假设只考虑一个片段,其他片段同理,则可以直接使用一个片段的时间步来表示交互过程。对于终止状态而言,后面引入吸收状态。吸收状态下,reward为0,并且只转移到自身。这样一来,在返回值不变的情况下,将片段任务和连续任务的返回值可以共同表示为如下表达式:
其中,T可以为无穷大,$\gamma$可以为1。
3.5 Policies and Value Functions(策略和值函数)
几乎所有的机器学习问题都需要定义值函数,用于衡量当前状态有多好,或者当前状态下给定动作有多好。此外,策略指的是在给定状态下,选择不同动作的概率映射,为$\pi ( a | s )$。
对于值函数,有两种定义,一种是给定状态和往后策略下的期望返回值,称作对于策略$\pi$的状态值函数。
第二种是给定当前状态下的动作,并且基于策略$\pi$,输出期望返回值,也称作对于策略$\pi$的动作值函数。
值函数往往从经验数据中估计得出,对于状态值函数而言,计算每个状态下的返回值均值,根据大数定理,时间步数无穷大时,均值将逼近返回值期望;对于动作值函数而言,同理对每个动作计算返回值均值。这种估计方法也称作蒙特卡洛搜索。
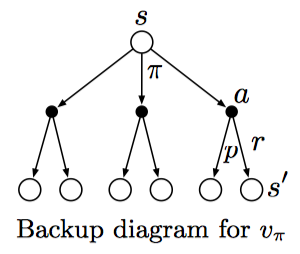
值函数一般满足可递归性,对于状态值函数而言,数学表达式如下:
这个公式也称作值函数$v_{\pi}$的贝尔曼方程,可以看做所有$s,a,s^{'}$组合的概率对下一个状态下值函数的加权求和。此外,还可以使用回溯图可视化展示。值得注意的是,这里的回溯图与上文中的转移图不同,状态转移图类似自动机,每一个节点代表一个唯一的状态;而回溯图中不同节点可能代表同一个状态。
3.6 Optimal Policies and Optimal Value Functions(最优策略和最优值函数)
最优策略意味着,该策略下所有状态的值函数大于等于其余策略。
最优状态值函数如下:
最优动作值函数如下:
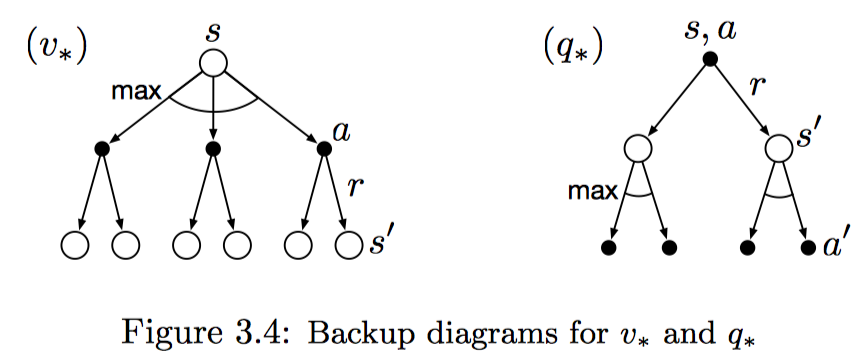
对于最优状态值函数来说,其不依赖于一个特定的策略;另外,它是一个值函数,可以转换为贝尔曼方程,这也称作贝尔曼最优方程:
对于最优动作值函数同理。
此外,也可以使用回溯图来表示这两个方程,与普通值函数的回溯比较,最优值函数的回溯图是在所有可能动作选择中取最大值,而普通值函数直接在所有动作中取加权平均。
有了最优状态值函数,可以直接使用一步前向搜索的方式确定最优策略。对于任意一个状态s,通过贝尔曼最优方程可以得到一个或者多个动作选择,那些只对这些动作赋予概率大于0的策略,被认为是最优策略。这种方式也可以看做是贪婪搜索。使用最优值函数进行贪婪搜索的方式,将求解长期最优期望返回值,转化为对每个状态本身进行局部求解。这样一来,一步前向搜索可以得到长期最优动作。
使用贝尔曼最优方程求解最优策略,基于三个假设:1. 精确了解环境的动态变化;2. 有足够的计算资源;3. 马尔科夫性。很多情况下,第二个假设无法满足,求解贝尔曼最优方程十分困难,实际中我们往往只需要求得贝尔曼最优方程的近似解,包括动态规划、层次搜索等方法。
3.7 Optimality and Approximation(最优性和近似性)
完全求解MDP问题,需要大量的计算资源和大量的内存。之前一些简单的有限状态MDP问题,可以使用列表格等方式计算所有可能情况,这种问题也称作表格问题,求解方式称作表格方式。
此外,使用强化学习的方法解决MDP问题,只需要求得近似解。强化学习的在线性质,使得有可能更多地学习如何为经常遇到的状态作出正确决策,从而来近似最优策略,代价是对不经常遇到的状态,关注度不够。